Θεάσεις: 6.429
Του Νίκου Δαπόντε,

Σύμφωνα με την παιδαγωγική οπτική αξιοποίησης του Thymio, οι αρχάριοι οφείλουν να εξοικειώνονται με τις βασικές έννοιες και έννοιες / μεγέθη της ρομποτικής, αναφορικά με τους αισθητήρες, τους ενεργοποιητές και τον προγραμματισμό ενός ρομπότ μέσω πρακτικών ασκήσεων και πειραματισμών. Αυτό σημαίνει ότι η προσέγγιση μας δίνει ιδιαίτερη έμφαση τόσο σε λειτουργίες και προγραμματισμό του κινητού ρομπότ όσο και στην πειραματική μέθοδο έρευνας επίλυσης προβλημάτων και όχι στην αγορά-προμήθεια αισθητήρων, αντιστάσεων κ.λ.π. με σκοπό την οικοδόμηση του κινητού ρομπότ, όπως στο Arduino. Υπενθυμίζουμε ότι το κινητό ρομποτάκι «από τη μάνα του» διαθέτει
- εννέα (9) αισθητήρες,
- δύο τροχούς – κινητήρες,
- μικρόφωνο,
- μεγάφωνο,
- θερμόμετρο,
- επιταχυνσιόμετρο (x, y, z),
- πέντε προγραμματιζόμενα πλήκτρα,
- χρονόμετρο,
- θέση μαρκαδόρου
Επιπλέον,
- μπορούμε να χρησιμοποιήσουμε ένα τηλεκοντρόλ προγραμματίζοντας τα πλήκτρα του, σύμφωνα με τις ανάγκες μιας δραστηριότητας και
- υποδοχές κατάλληλες για να δεχτούν τα «τουβλάκια της Lego», εφόσον βέβαια εξυπηρετούν τους στόχους μιας πειραματικής διάταξης ρομποτικής.

Σκοπός αυτής της εργασίας είναι η διαμόρφωση δραστηριοτήτων εκπαιδευτικής ρομποτικής με θέματα όπως, για παράδειγμα, το «πιλοτάρισμα» ενός ρομπότ με δύο τροχούς μέσα σε ποικίλους διαδρόμους, παιχνίδια συνεργασίας με το πιλοτάρισμα ενός ρομπότ με δύο τηλεκοντρόλ, το παρκάρισμα του κινητού ρομπότ κ.α.
Τρία είναι τα κοινά χαρακτηριστικά αυτών των δραστηριοτήτων:
α) Το όχημα – ρομπότ διαθέτει δύο τροχούς οι οποίοι περιστρέφονται στα άκρα ενός άξονα μήκους 9.4 εκατοστών, με τη βοήθεια δύο κινητήρες συνεχούς ρεύματος DC (Direct Current). Συνολικά, διακρίνουμε οκτώ μορφές κίνησης ενός κινητού ρομπότ με δύο τροχούς.

β) Το «πιλοτάρισμα» γίνεται τόσο με τα γνωστά πέντε πλήκτρα που βρίσκονται στο πάνω μέρος του Thymio (μπροστά, πίσω, δεξιά, αριστερά, στοπ) όσο και με ένα τηλεκοντρόλ με το σχετικό μεγάλο αριθμό πλήκτρων.
γ) Ο προγραμματισμός τους γίνεται στο περιβάλλον «Οπτικού προγραμματισμού,VPL» μια και διαθέτει όλες τις κατάλληλες εντολές για το «πιλοτάρισμα» από τη μεριά των αρχάριων. Η πρώτη θεματική ενότητα αναφέρεται στο «πιλοτάρισμα» του Thymio με τη χρήση των πλήκτρων και αισθητήρων του και η δεύτερη στο πιλοτάρισμα με το τηλεκοντρόλ.
Μετά από μια σύντομη μελέτη των βασικών μορφών κίνησης του ρομπότ κατέληξα στους παρακάτω πίνακες συμβάντων και ενεργειών [1] και [2] για τις δύο περιπτώσεις αντίστοιχα:

Α.Ο κώδικας για το «πιλοτάρισμα» με πλήκτρα και αισθητήρες του Thymio
Με βάση τα στοιχεία «συμβάντων – ενεργειών» του πίνακα 1, εύκολα διαμορφώνουμε τον κώδικα του προγράμματος. Για την ταχύτητα των τροχών επέλεξα τη μικρότερη τιμή V = 50 μονάδες που μου επιτρέπει το περιβάλλον VPL. Εννοείται ότι αν χρειαστεί μπορείτε να επιλέξετε μεγαλύτερες τιμές (100, 150, 200 ……500) παρεμβαίνοντας στον κώδικα.

Μπορείς να δοκιμάσεις τις αλλαγές που μπορούν να προκαλούν τα πλήκτρα, κάθε φορά, στη συμπεριφορά του κινητού ρομπότ ώστε να εξοικειωθείς κυρίως με τις διαφορές τους. Αρχικά, δεν υπάρχει λόγος να θυμάσαι τι ακριβώς κάνει το κάθε πλήκτρο ή αισθητήρας, μια και μπορείς να εκτυπώσεις τον παραπάνω πίνακα με τις οκτώ συμπεριφορές κίνησης του οποιουδήποτε κινητού ρομπότ εδάφους, όπως το Thymio.
Β.Ο κώδικας για το «πιλοτάρισμα» με πλήκτρα του τηλεκοντρόλ
Με βάση τα στοιχεία «συμβάντων – ενεργειών» του πίνακα 2, εύκολα μπορούμε να διαμορφώσουμε τον κώδικα του προγράμματος για τη χρήση του τηλεκοντρόλ, με ίδιες ακριβώς τιμές για τις ταχύτητες των τροχών (V = 50 μονάδες), όπως είδαμε παραπάνω και με τα πλήκτρα του Thymio.

Οι πειραματικές δοκιμασίες
Ακολουθεί μια σειρά πρακτικών ασκήσεων με τη μορφή «πρόβλεψης-επαλήθευσης» για τις οποίες θα χρειαστείς απλά υλικά όπως μαρκαδόρο, ψαλίδι, χαρτί Α4, σελοτέιπ.
Σημείωση: Γενικά, οι δοκιμές μπορούν να γίνουν είτε πάνω στο τραπέζι με μικρές ταχύτητες (V=50 μονάδες) είτε στο δάπεδο με μεγαλύτερες, για παράδειγμα V = 200 μονάδες. Σε κάθε περίπτωση θα πρέπει να ελέγχεις την καταλληλότητα της ταχύτητας του ρομπότ στον αρχικό κώδικα (παντού V=50 μονάδες) και να την αλλάζεις όπου θεωρείς ότι χρειάζεται. Αυτό το πετυχαίνεις με τις επιθυμητές επιλογές της ταχύτητας κάθε τροχού, με τη βοήθεια των δύο μεταβολέων στα εικονίδια κίνησης του προγράμματος σε καθεμιά από τις περιπτώσεις Α) και Β).
Δοκιμασία. Πιλοτάρισμα πάνω σε λευκές λωρίδες – διαδρομές με τα πλήκτρα και τους αισθητήρες του ρομπότ ή με το τηλεκοντρόλ – Πρόβλεψη συμβάντων και Επαλήθευση με το ρομποτάκι να είναι εφοδιασμένο με μαρκαδόρο.
Περίπτωση 1. Κίνηση σε λευκή λωρίδα – διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή ορθογώνια λωρίδα όπως στο σχήμα.
α) Σκέψου το συμβάν ή τα συμβάντα που πρέπει να προκαλέσεις για να «πιλοτάρεις» το ρομποτάκι έτσι ώστε να κινείται, συνεχώς, πάνω στη λευκή ορθογώνια λωρίδα.
β) Επαλήθευσε τις προβλέψεις σου με το να τις υποβάλλεις σε δοκιμασία στη δική σου λωρίδα. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 2. Κίνηση σε καμπυλόγραμμη διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή καμπυλόγραμμη λωρίδα παρόμοια με αυτή του σχήματος.

α) Σκέψου τι πρέπει να κάνεις είτε με τα κατάλληλα πλήκτρα και τους αισθητήρες του Thymio είτε με το τηλεκοντρόλ, για να τo «πιλοτάρεις» πάνω στην καμπυλόγραμμη λωρίδα.
β) Προσπάθησε να επαληθεύσεις τις προβλέψεις σου. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 3. Κίνηση σε κυκλική διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή κυκλική λωρίδα, παρόμοια με αυτή του σχήματος.

α) Σκέψου τον πιο εύκολο και γρήγορο τρόπο για να «πιλοτάρεις» το ρομποτάκι πάνω στην κυκλική διαδρομή. Σημείωσε τις απαντήσεις σου:
β) Προσπάθησε να επαληθεύσεις τις προβλέψεις σου. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 4. Κίνηση σε γεωμετρικές διαδρομές με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Φτιάξτε απλές πολυγωνικές διαδρομές (για παράδειγμα, τριγωνική, τετράπλευρη κ.λ.π.) όπως αυτές του σχήματος ή άλλες γεωμετρικές της αρεσκείας σας.

α) Σκέψου τον πιο εύκολο και γρήγορο τρόπο για να «πιλοτάρεις» το ρομποτάκι πάνω σε καθεμιά από τις διαδρομές είτε με τα πλήκτρα του Thymio είτε με το τηλεκοντρόλ.
β) Επαλήθευσε τις προβλέψεις σου.
Σχόλια και παρατηρήσεις
1.Η ενασχόλησή μου με τις τέσσερεις περιπτώσεις που προηγήθηκαν με οδήγησαν στο να σκεφτώ με πόσους τρόπους μπορούμε να «πιλοτάρουμε» το ρομποτάκι – με τα κουμπιά ή το τηλεκοντρόλ – έτσι ώστε:
α) να ακολουθεί όσο γίνεται καλύτερα μια ευθεία λωρίδα
β) να ακολουθεί μια επιθυμητή γωνία
Στην πρώτη περίπτωση, η αυθόρμητη απάντηση είναι, προφανώς, τα δύο πλήκτρα μπροστά (FD) και πίσω (ΒΚ).
Αν ψάξουμε λίγο παραπάνω, τότε διαπιστώνουμε στην πράξη ότι μπορούμε να έχουμε περίπου το ίδιο αποτέλεσμα με τη μέθοδο του Ζιγκ Ζαγκ, δηλαδή να πλησιάζω εναλλάξ τους δύο πίσω (δεξιά / αριστερά) αισθητήρες. Εννοείται ότι μ’ αυτόν τον τρόπο, το κινητό μας κινείται προς τα πίσω, ακολουθώντας περίπου ευθύγραμμη διαδρομή.
Στη δεύτερη περίπτωση, έχουμε δύο βασικές ακολουθίες εντολών για να προκαλέσουμε μια κίνηση του Thymio σε ποικίλες στροφές. Και στις δύο περιπτώσεις απαιτείται συμμετοχή του χρήστη διαμέσου των πλήκτρων του Thymio ή του τηλεκοντρόλ.

2.Το παρκάρισμα του κινητού ρομπότ αποτελεί μια πρόκληση για τους αρχάριους. Πολύ πρόχειρα, πάνω στο τραπέζι για ευκολία μου, δοκίμασα να παρκάρω το Thymio σε μια περιοχή που σχεδίασα στο χαρτί. Με την πρώτη κιόλας φορά τα κατάφερα σχετικά καλά χρησιμοποιώντας τους δύο πίσω αισθητήρες (για στροφές, πίσω δεξιά και αριστερά) καθώς και τα πλήκτρα, όπως μαρτυρούν τα ίχνη του μαρκαδόρου στη φωτογραφία.

3. Συνεργασία δύο χρηστών που χρησιμοποιούν από ένα τηλεκοντρόλ. Έτσι, μπορούμε να επινοήσουμε διάφορα καθήκοντα-παιχνίδια στα οποία να κυριαρχεί η συνεργασία τους για την επίτευξη ενός κοινού σκοπού.

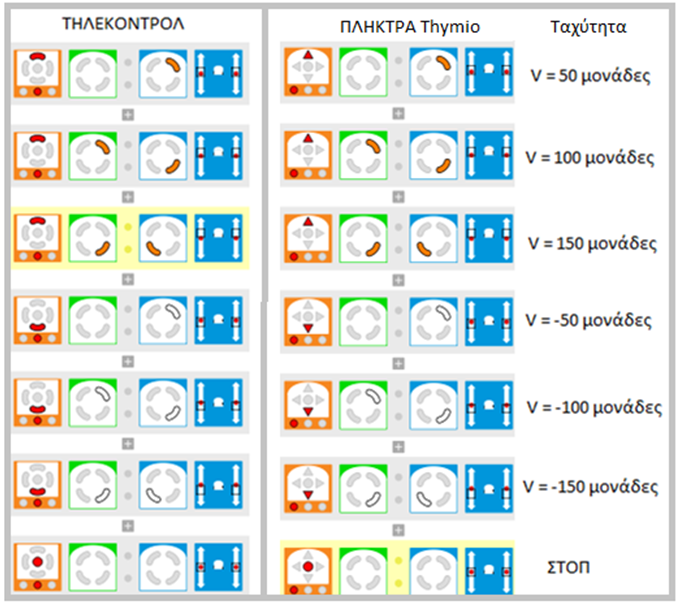
4. Βασιζόμενοι στην προηγούμενη ανάρτησή μας στο Eduportal (https://www.eduportal.gr/thymio-kinisi-1/) χρήσιμη μπορεί να φανεί η διαδικασία με την οποία ρυθμίζουμε την ταχύτητα του ρομπότ με τη χρήση τηλεκοντρόλ. Με τα πλήκτρα μπροστά και πίσω πετυχαίνουμε αντίστοιχα αύξηση ή ελάττωση της ταχύτητας (50, 100, 150 για κίνηση μπροστά και -50, -100, -150 για κίνηση προς τα πίσω). Με παρόμοιο τρόπο φτιάχνουμε και την αντίστοιχη διαδικασία με τα γνωστά πλήκτρα του Thymio.
Για περισσότερα…….
Σχετικά



Ιούν 8 2018
Διαθεματική μελέτη ευθύγραμμων κινήσεων του ρομπότ Thymio (Μέρος 2ο, πιλοτάρισμα με πλήκτρα του Thymio και με τηλεκοντρόλ)
Του Νίκου Δαπόντε,
Σύμφωνα με την παιδαγωγική οπτική αξιοποίησης του Thymio, οι αρχάριοι οφείλουν να εξοικειώνονται με τις βασικές έννοιες και έννοιες / μεγέθη της ρομποτικής, αναφορικά με τους αισθητήρες, τους ενεργοποιητές και τον προγραμματισμό ενός ρομπότ μέσω πρακτικών ασκήσεων και πειραματισμών. Αυτό σημαίνει ότι η προσέγγιση μας δίνει ιδιαίτερη έμφαση τόσο σε λειτουργίες και προγραμματισμό του κινητού ρομπότ όσο και στην πειραματική μέθοδο έρευνας επίλυσης προβλημάτων και όχι στην αγορά-προμήθεια αισθητήρων, αντιστάσεων κ.λ.π. με σκοπό την οικοδόμηση του κινητού ρομπότ, όπως στο Arduino. Υπενθυμίζουμε ότι το κινητό ρομποτάκι «από τη μάνα του» διαθέτει
Επιπλέον,
Σκοπός αυτής της εργασίας είναι η διαμόρφωση δραστηριοτήτων εκπαιδευτικής ρομποτικής με θέματα όπως, για παράδειγμα, το «πιλοτάρισμα» ενός ρομπότ με δύο τροχούς μέσα σε ποικίλους διαδρόμους, παιχνίδια συνεργασίας με το πιλοτάρισμα ενός ρομπότ με δύο τηλεκοντρόλ, το παρκάρισμα του κινητού ρομπότ κ.α.
Τρία είναι τα κοινά χαρακτηριστικά αυτών των δραστηριοτήτων:
α) Το όχημα – ρομπότ διαθέτει δύο τροχούς οι οποίοι περιστρέφονται στα άκρα ενός άξονα μήκους 9.4 εκατοστών, με τη βοήθεια δύο κινητήρες συνεχούς ρεύματος DC (Direct Current). Συνολικά, διακρίνουμε οκτώ μορφές κίνησης ενός κινητού ρομπότ με δύο τροχούς.
β) Το «πιλοτάρισμα» γίνεται τόσο με τα γνωστά πέντε πλήκτρα που βρίσκονται στο πάνω μέρος του Thymio (μπροστά, πίσω, δεξιά, αριστερά, στοπ) όσο και με ένα τηλεκοντρόλ με το σχετικό μεγάλο αριθμό πλήκτρων.
γ) Ο προγραμματισμός τους γίνεται στο περιβάλλον «Οπτικού προγραμματισμού,VPL» μια και διαθέτει όλες τις κατάλληλες εντολές για το «πιλοτάρισμα» από τη μεριά των αρχάριων. Η πρώτη θεματική ενότητα αναφέρεται στο «πιλοτάρισμα» του Thymio με τη χρήση των πλήκτρων και αισθητήρων του και η δεύτερη στο πιλοτάρισμα με το τηλεκοντρόλ.
Μετά από μια σύντομη μελέτη των βασικών μορφών κίνησης του ρομπότ κατέληξα στους παρακάτω πίνακες συμβάντων και ενεργειών [1] και [2] για τις δύο περιπτώσεις αντίστοιχα:
Α.Ο κώδικας για το «πιλοτάρισμα» με πλήκτρα και αισθητήρες του Thymio
Με βάση τα στοιχεία «συμβάντων – ενεργειών» του πίνακα 1, εύκολα διαμορφώνουμε τον κώδικα του προγράμματος. Για την ταχύτητα των τροχών επέλεξα τη μικρότερη τιμή V = 50 μονάδες που μου επιτρέπει το περιβάλλον VPL. Εννοείται ότι αν χρειαστεί μπορείτε να επιλέξετε μεγαλύτερες τιμές (100, 150, 200 ……500) παρεμβαίνοντας στον κώδικα.
Μπορείς να δοκιμάσεις τις αλλαγές που μπορούν να προκαλούν τα πλήκτρα, κάθε φορά, στη συμπεριφορά του κινητού ρομπότ ώστε να εξοικειωθείς κυρίως με τις διαφορές τους. Αρχικά, δεν υπάρχει λόγος να θυμάσαι τι ακριβώς κάνει το κάθε πλήκτρο ή αισθητήρας, μια και μπορείς να εκτυπώσεις τον παραπάνω πίνακα με τις οκτώ συμπεριφορές κίνησης του οποιουδήποτε κινητού ρομπότ εδάφους, όπως το Thymio.
Β.Ο κώδικας για το «πιλοτάρισμα» με πλήκτρα του τηλεκοντρόλ
Με βάση τα στοιχεία «συμβάντων – ενεργειών» του πίνακα 2, εύκολα μπορούμε να διαμορφώσουμε τον κώδικα του προγράμματος για τη χρήση του τηλεκοντρόλ, με ίδιες ακριβώς τιμές για τις ταχύτητες των τροχών (V = 50 μονάδες), όπως είδαμε παραπάνω και με τα πλήκτρα του Thymio.
Οι πειραματικές δοκιμασίες
Ακολουθεί μια σειρά πρακτικών ασκήσεων με τη μορφή «πρόβλεψης-επαλήθευσης» για τις οποίες θα χρειαστείς απλά υλικά όπως μαρκαδόρο, ψαλίδι, χαρτί Α4, σελοτέιπ.
Σημείωση: Γενικά, οι δοκιμές μπορούν να γίνουν είτε πάνω στο τραπέζι με μικρές ταχύτητες (V=50 μονάδες) είτε στο δάπεδο με μεγαλύτερες, για παράδειγμα V = 200 μονάδες. Σε κάθε περίπτωση θα πρέπει να ελέγχεις την καταλληλότητα της ταχύτητας του ρομπότ στον αρχικό κώδικα (παντού V=50 μονάδες) και να την αλλάζεις όπου θεωρείς ότι χρειάζεται. Αυτό το πετυχαίνεις με τις επιθυμητές επιλογές της ταχύτητας κάθε τροχού, με τη βοήθεια των δύο μεταβολέων στα εικονίδια κίνησης του προγράμματος σε καθεμιά από τις περιπτώσεις Α) και Β).
Δοκιμασία. Πιλοτάρισμα πάνω σε λευκές λωρίδες – διαδρομές με τα πλήκτρα και τους αισθητήρες του ρομπότ ή με το τηλεκοντρόλ – Πρόβλεψη συμβάντων και Επαλήθευση με το ρομποτάκι να είναι εφοδιασμένο με μαρκαδόρο.
Περίπτωση 1. Κίνηση σε λευκή λωρίδα – διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή ορθογώνια λωρίδα όπως στο σχήμα.
α) Σκέψου το συμβάν ή τα συμβάντα που πρέπει να προκαλέσεις για να «πιλοτάρεις» το ρομποτάκι έτσι ώστε να κινείται, συνεχώς, πάνω στη λευκή ορθογώνια λωρίδα.
β) Επαλήθευσε τις προβλέψεις σου με το να τις υποβάλλεις σε δοκιμασία στη δική σου λωρίδα. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 2. Κίνηση σε καμπυλόγραμμη διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή καμπυλόγραμμη λωρίδα παρόμοια με αυτή του σχήματος.
α) Σκέψου τι πρέπει να κάνεις είτε με τα κατάλληλα πλήκτρα και τους αισθητήρες του Thymio είτε με το τηλεκοντρόλ, για να τo «πιλοτάρεις» πάνω στην καμπυλόγραμμη λωρίδα.
β) Προσπάθησε να επαληθεύσεις τις προβλέψεις σου. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 3. Κίνηση σε κυκλική διαδρομή με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Πάνω στο τραπέζι ή στο δάπεδο κόλλησε μια λευκή κυκλική λωρίδα, παρόμοια με αυτή του σχήματος.
α) Σκέψου τον πιο εύκολο και γρήγορο τρόπο για να «πιλοτάρεις» το ρομποτάκι πάνω στην κυκλική διαδρομή. Σημείωσε τις απαντήσεις σου:
β) Προσπάθησε να επαληθεύσεις τις προβλέψεις σου. Δοκίμασε όσες φορές χρειάζεσαι….
Περίπτωση 4. Κίνηση σε γεωμετρικές διαδρομές με τα πλήκτρα Thymio ή το τηλεκοντρόλ
Φτιάξτε απλές πολυγωνικές διαδρομές (για παράδειγμα, τριγωνική, τετράπλευρη κ.λ.π.) όπως αυτές του σχήματος ή άλλες γεωμετρικές της αρεσκείας σας.
α) Σκέψου τον πιο εύκολο και γρήγορο τρόπο για να «πιλοτάρεις» το ρομποτάκι πάνω σε καθεμιά από τις διαδρομές είτε με τα πλήκτρα του Thymio είτε με το τηλεκοντρόλ.
β) Επαλήθευσε τις προβλέψεις σου.
Σχόλια και παρατηρήσεις
1.Η ενασχόλησή μου με τις τέσσερεις περιπτώσεις που προηγήθηκαν με οδήγησαν στο να σκεφτώ με πόσους τρόπους μπορούμε να «πιλοτάρουμε» το ρομποτάκι – με τα κουμπιά ή το τηλεκοντρόλ – έτσι ώστε:
α) να ακολουθεί όσο γίνεται καλύτερα μια ευθεία λωρίδα
β) να ακολουθεί μια επιθυμητή γωνία
Στην πρώτη περίπτωση, η αυθόρμητη απάντηση είναι, προφανώς, τα δύο πλήκτρα μπροστά (FD) και πίσω (ΒΚ).
Αν ψάξουμε λίγο παραπάνω, τότε διαπιστώνουμε στην πράξη ότι μπορούμε να έχουμε περίπου το ίδιο αποτέλεσμα με τη μέθοδο του Ζιγκ Ζαγκ, δηλαδή να πλησιάζω εναλλάξ τους δύο πίσω (δεξιά / αριστερά) αισθητήρες. Εννοείται ότι μ’ αυτόν τον τρόπο, το κινητό μας κινείται προς τα πίσω, ακολουθώντας περίπου ευθύγραμμη διαδρομή.
Στη δεύτερη περίπτωση, έχουμε δύο βασικές ακολουθίες εντολών για να προκαλέσουμε μια κίνηση του Thymio σε ποικίλες στροφές. Και στις δύο περιπτώσεις απαιτείται συμμετοχή του χρήστη διαμέσου των πλήκτρων του Thymio ή του τηλεκοντρόλ.
2.Το παρκάρισμα του κινητού ρομπότ αποτελεί μια πρόκληση για τους αρχάριους. Πολύ πρόχειρα, πάνω στο τραπέζι για ευκολία μου, δοκίμασα να παρκάρω το Thymio σε μια περιοχή που σχεδίασα στο χαρτί. Με την πρώτη κιόλας φορά τα κατάφερα σχετικά καλά χρησιμοποιώντας τους δύο πίσω αισθητήρες (για στροφές, πίσω δεξιά και αριστερά) καθώς και τα πλήκτρα, όπως μαρτυρούν τα ίχνη του μαρκαδόρου στη φωτογραφία.
3. Συνεργασία δύο χρηστών που χρησιμοποιούν από ένα τηλεκοντρόλ. Έτσι, μπορούμε να επινοήσουμε διάφορα καθήκοντα-παιχνίδια στα οποία να κυριαρχεί η συνεργασία τους για την επίτευξη ενός κοινού σκοπού.
4. Βασιζόμενοι στην προηγούμενη ανάρτησή μας στο Eduportal (https://www.eduportal.gr/thymio-kinisi-1/) χρήσιμη μπορεί να φανεί η διαδικασία με την οποία ρυθμίζουμε την ταχύτητα του ρομπότ με τη χρήση τηλεκοντρόλ. Με τα πλήκτρα μπροστά και πίσω πετυχαίνουμε αντίστοιχα αύξηση ή ελάττωση της ταχύτητας (50, 100, 150 για κίνηση μπροστά και -50, -100, -150 για κίνηση προς τα πίσω). Με παρόμοιο τρόπο φτιάχνουμε και την αντίστοιχη διαδικασία με τα γνωστά πλήκτρα του Thymio.
Για περισσότερα…….
Κοινοποιήστε:
Σχετικά
By eduportal • Εκπαιδευτικό Λογισμικό • 0 • Tags: thymio, Νίκος Δαπόντες